Zostaliśmy poproszeni o zbadanie, w jaki sposób połączenie wizji komputerowej i czujników może pomóc maszynom poruszać się po lasach z większą precyzją i planować trasy z mniejszym wpływem na środowisko.
Co zrobiliśmy? ✅ Połączyliśmy dane LiDAR i RGB, aby stworzyć dokładne mapy lasów 3D ✅ Wykorzystaliśmy segmentację semantyczną do wykrywania obiektów ✅ Wspomagamy inteligentniejszą i bardziej zrównoważoną wycinkę drzew
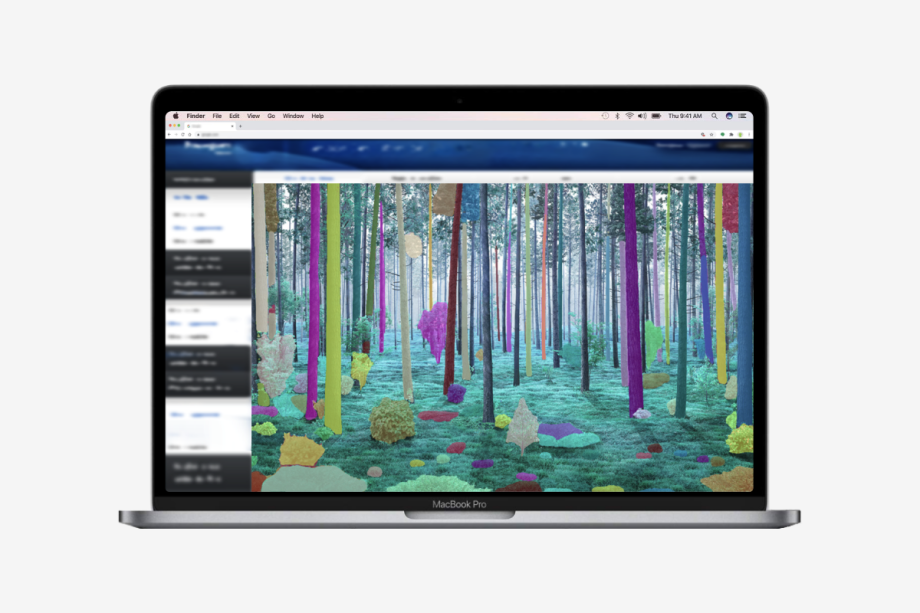
Jak to zrobiliśmy: 🛠️ Zbudowaliśmy drona wyposażonego w czujnik LiDAR i kamerę RGB o wysokiej rozdzielczości, aby zbierać dokładne dane 3D i wizualne w rzeczywistych warunkach leśnych 🛠️ Połączyliśmy skany i obrazy LiDAR do wykrywania obiektów i terenu 🛠️ Zastosowaliśmy techniki segmentacji semantycznej, w tym model segmentacji dowolnych obiektów (SAM), aby precyzyjnie identyfikować i klasyfikować drzewa, skały i strefy chronione 🛠️ Stworzyliśmy podwaliny pod rozpoznawanie gatunków drzew i bezpieczne planowanie tras maszyn z minimalnym wpływem na środowisko.
